
 宇宙飛行士に代わって宇宙空間で作業を行う宇宙ロボットは, 作業用の腕(マニピュレータ)と自由に飛行するための衛星本体から構成される. 宇宙ロボットは地上のロボットのように固定点を持たないため,マニピュレータを動かすとその反動で衛星本体が動き, 姿勢が変化するという,非常に複雑な力学的性質を持つ. しかし,この複雑さは,良く知られた運動量と角運動量の保存則によって, 明確に特徴づけられる.これを考慮することにより,地上のマニピュレータと同様の力学的性質が見出され, 既存の制御則が拡張できる. さらに,この保存則を拘束条件として考慮した系の運動学および動力学を記述する微分方程式を求め, 制御に必要な慣性パラメータがこれらの方程式中で線形に現れることを示すとともに, パラメータ同定法および適応制御法を開発している.
宇宙飛行士に代わって宇宙空間で作業を行う宇宙ロボットは, 作業用の腕(マニピュレータ)と自由に飛行するための衛星本体から構成される. 宇宙ロボットは地上のロボットのように固定点を持たないため,マニピュレータを動かすとその反動で衛星本体が動き, 姿勢が変化するという,非常に複雑な力学的性質を持つ. しかし,この複雑さは,良く知られた運動量と角運動量の保存則によって, 明確に特徴づけられる.これを考慮することにより,地上のマニピュレータと同様の力学的性質が見出され, 既存の制御則が拡張できる. さらに,この保存則を拘束条件として考慮した系の運動学および動力学を記述する微分方程式を求め, 制御に必要な慣性パラメータがこれらの方程式中で線形に現れることを示すとともに, パラメータ同定法および適応制御法を開発している.
宇宙ロボットは,工場のロボットとは異なり,整備されていない環境の下, 多様で複雑な作業を遂行しなければならない.この不整備な環境への適応能力を獲得するために, 視覚情報援用,環境変動にロバストな制御等の要素技術を研究開発した. また,宇宙ロボットの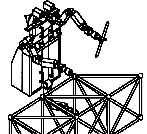 地上模擬実験システムを開発し,研究開発した要素技術を統合して, 自律的なトラス構造物の組立実験を成功させた. さらに,ロボットの知能化のために,ニューラルネットワークを用いた適応的制御, 環境と相互作用を伴う作業の力学的理解,学習に基づく作業の遂行などの研究を進めている.
地上模擬実験システムを開発し,研究開発した要素技術を統合して, 自律的なトラス構造物の組立実験を成功させた. さらに,ロボットの知能化のために,ニューラルネットワークを用いた適応的制御, 環境と相互作用を伴う作業の力学的理解,学習に基づく作業の遂行などの研究を進めている.