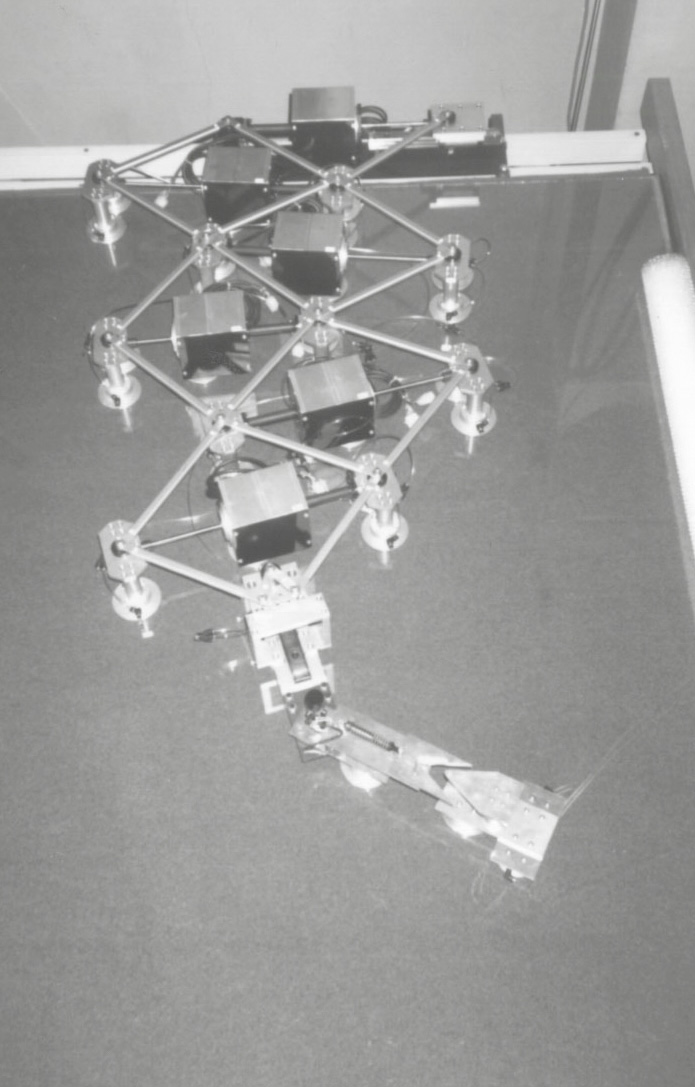
 知的適応構造物の一つとして,アクチュエータとセンサーを配置したトラス型メカニズムを搭載プロセッサーで制御し, 様々なミッションを達成できるVGT (variable geometry truss) について研究している. VGTは,高精度,高剛性なので,長大マニピュレータ,ドッキング機構などへの利用を検討している. 多くのアクチュエータを持つ冗長系,幾何学的な閉ループを含むといった特徴を踏まえて制御方法に関する研究を行っている. 具体的には,幾何学的な閉ループを含む系の逆動力学計算アルゴリズム,冗長性を利用する動力学制御, 関節摩擦を保証する力制御を提案している. さらに,画像計測等の要素技術とともに,開発したランデブードッキング地上模擬実験システム上に統合し, 自律的なソフトドッキング実験を成功させた.
知的適応構造物の一つとして,アクチュエータとセンサーを配置したトラス型メカニズムを搭載プロセッサーで制御し, 様々なミッションを達成できるVGT (variable geometry truss) について研究している. VGTは,高精度,高剛性なので,長大マニピュレータ,ドッキング機構などへの利用を検討している. 多くのアクチュエータを持つ冗長系,幾何学的な閉ループを含むといった特徴を踏まえて制御方法に関する研究を行っている. 具体的には,幾何学的な閉ループを含む系の逆動力学計算アルゴリズム,冗長性を利用する動力学制御, 関節摩擦を保証する力制御を提案している. さらに,画像計測等の要素技術とともに,開発したランデブードッキング地上模擬実験システム上に統合し, 自律的なソフトドッキング実験を成功させた.
京都大学 航空宇宙力学講座
Kyoto Univ. Dynamics in Aeronautics and Astronautics
